PWM/PID/Servo Motor Control using Orangutan from Pololu:
Hardware and Software
Tests
Jim Remington
Last update: 10/10/2007
Lego pump movies: 1
2
3
4
This site was created to share some experiences with the nice little
Orangutan controllers from Pololu corp.  The Pololu folks are great engineers but despite
enthusiastic promises of examples to come, they do not have time to
provide software support for their products. They need help
from their users!
I'll be happy to post code/links/comments from others here. For example,
Cathy Saxton of Idle Loop Software Design has posted an extensive C++
code
example
for the Orangutan that is well worth studying. Here, I provide some
vanilla C examples.
The Pololu folks are great engineers but despite
enthusiastic promises of examples to come, they do not have time to
provide software support for their products. They need help
from their users!
I'll be happy to post code/links/comments from others here. For example,
Cathy Saxton of Idle Loop Software Design has posted an extensive C++
code
example
for the Orangutan that is well worth studying. Here, I provide some
vanilla C examples.
The Orangutan is based on the ATmega8 (more recently, the ATmega168)
controller from Atmel, which is
great because of the availability of excellent free development
software -- especially WinAVR. I use PIC processors when I can
because the instruction set and hardware is so simple, but usually
program them with MPLAB in assembler. PIC C compilers are expensive, and
not as flexible as the fine gcc compiler.
The down side is that the built-in hardware of the ATmega chips is
extremely flexible and the documentation is very hard to read. So, just
getting a simple pulse-width modulated motor controller working can be
difficult unless you have examples to follow.
NOTE: There are many differences in this family of processors,
especially some of the register names and control bit assignments for
peripherals such as the timers, UART, interrupts etc. are different.
Therefore, code written for the mega8 will not necessarily run on, or may
not compile for the mega168. The compiler will warn about incorrect
register names, but check the data sheet!
The development system
I use a laptop running WinXP Pro
connected to the AVRISP mkII programmer. I now use AVRStudio 4 and GCC for
development, because WinAVR doesn't yet fully support the mkII programmer
-- which is too bad because Programmer's Notepad is a better editor than
the one that comes with Studio4.
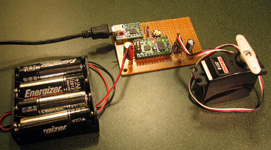
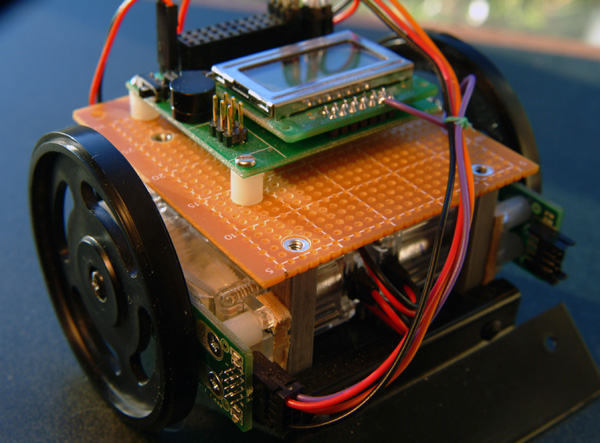
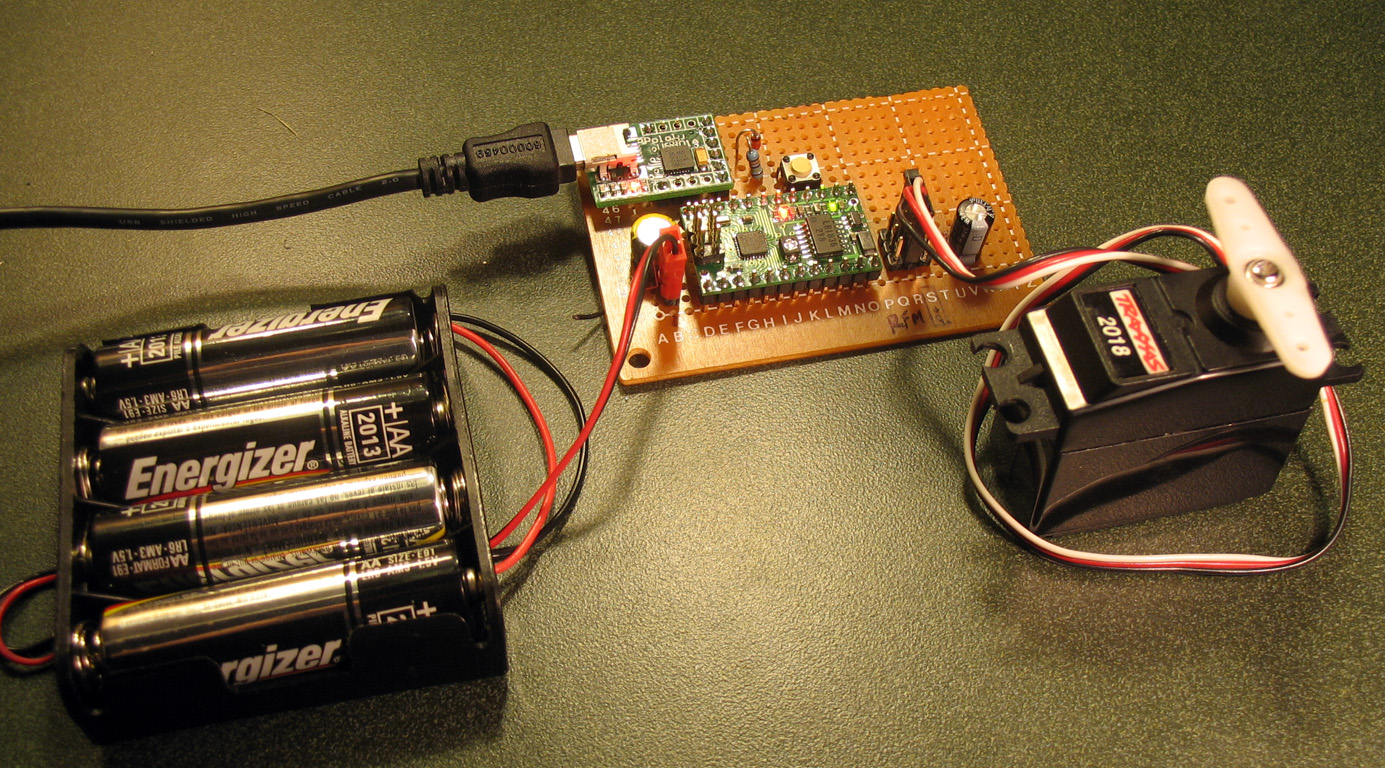
Robot testbed
The test bed is a home-made minisumo rig controlled by the Orangutan. The
motor controller drives two standard servos, modified for
free rotation and from which the electronics have been removed. The entire
thing is powered by a single 6 volt alkaline battery pack.
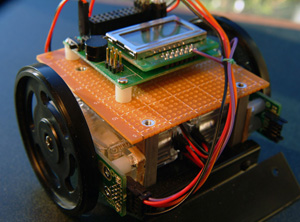
"WheelWatcher" modules (WW-01) from Nubotics,
attached to the servo bodies, were used to measure the wheel rpms.
The code examples provided by Nubotics were useful to figure out how to
use the modules, but the examples are very complex--far more complex than
they need to be to get the basic job done. I monitored only the right
wheel in my tests. The clock output of the WW-01 (purple lead) was
connected to INT0 (PORTD.2), which unfortunately is required as an output
to the Orangutan LCD module. An INT0 interrupt routine counts segment
ticks and measures the period of wheel rotation (time between segment
ticks), accumulating average values. The direction of wheel rotation and
total travel distance was monitored by the same routine, with the WW-01
direction bit (orange wire) connected to PORTC.5. The distance and
direction information were not used in my example, but could be used for
dead reckoning. This setup was later used to implement error-correcting
proportional (PID) speed control, as PWM alone is insufficient for robust
speed control. See below.
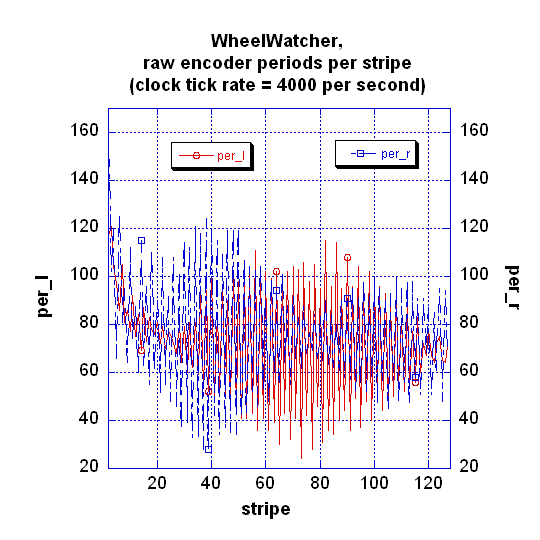
My opinion of the WheelWatcher? Glad you asked! A good idea, but
far too limited in mounting flexibility for different
motor/wheel configurations--I now have a spare set that won't fit my other
applications. It is also very noisy. If you try to estimate rpm's by measuring
the time between encoder ticks (128 per revolution), you see a huge stripe-to-stripe
variation, such as seen at right for wheels rotating at a fixed PWM setting corresponding
to about 30 rpm.
Also, if you make a mistake applying the black-and-silver reflective
wheel sticker, the replacement cost is outrageous -- $5.00 plus
shipping at one supplier.
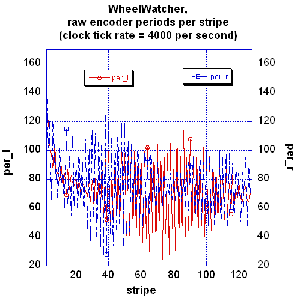
The wheel speed is measured by computing the period between segment
ticks. Timer0 increments at 3.9 kHz and when it overflows, an interrupt
causes a counter to be incremented, extending the resolution to 24 bits.
As each wheel tick occurs, a time stamp is saved and used to compute the period
after the next tick. This approach fails when the wheel is stalled, so
a more complete routine (see PID code below) should include a timeout to
indicate zero velocity. A low pass filter is absolutely required to iron
out the noise in the data (see above).
The LCD display on the Orangutan is good for accumulating the
information on the wheel rotational period as a function of the PWM
setting, but care has to be taken to disable the INT0 interrupt and
reinitialize the LCD output bit on PORTD, as they can't be used by the two
routines simultaneously. The actual test code, not cleaned up for
publication, is WW_pwm_test.c, which requires routines to run the
LCD display lcd_or.c (modified from an example
posted on the Polulo user forum) and one of the PWM modules mentioned
below. This
program steps through a series of PWM settings, measures the wheel
rotational period, and outputs the period and PWM setting on lines 1 and 2
of the LCD display, respectively. The wheel speed is calculated in
arbitrary units as 1/(period*0.256E-3)--see graphs below.
On board motor controller
The on-board LB1836M dual H-bridge has four modes of operation (taken
from the data sheet, available from Pololu, or here.)
| IN1/3 | IN2/4 | OUT1/3 | OUT2/4 |
Mode |
| H | L | H | L |
Forward |
| L | H | L | H | Reverse |
| H | H | L | L | Brake |
| L | L | Off | Off | Coast |
Forward and reverse modes are obvious, however the difference between
the "brake" and "coast" or output-off modes is less obvious. Brake mode is
in principle supposed to stop the motor quickly by acting as a short
circuit across the motor terminals, but the current must flow through one
of the output surge suppressor diodes as well as an output transistor,
depending on the direction of motor rotation. The forward voltage drop
across these components limits the effectiveness of the braking action
Conversely, in "output off" mode the outputs do not conduct current and
the motor coasts or freewheels. Either mode can be used for PWM control
but the results are quite different (see below).
Brake action is
power hungry
In brake mode, in order to hold the outputs low at the
rated collector current, base current must flow in the output transistors.
I measured this to be about 30 mA for each bridge (which is in agreement
with the chip documentation), so about 60 mA is wasted to hold the outputs
low if the motors are not rotating. A controller with FET output
transistors may be a better choice, but according to fearless leader ;)
Don Rumsfeld, you go to war with what you have. To save power, the motor
outputs should be turned off any time braking action is not needed. I have
not implemented this in my code, except for the case that speed=0.
PWM modes
The Timer1 module of the ATmega8 provides several PWM modes. I
experimented with two of these: 8-bit phase correct PWM (mode 1) and 8-bit
fast PWM (mode 5). There is no need to use more than 8 bits of speed
resolution. NOTE that the timer/counter1 registers are 16 bits wide, so in
8-bit PWM modes, take care to avoid setting speeds > +/- 255 or unexpected
results will occur. In either mode, timer/counter register TCNT1
increments at a set rate and the value is continuously compared to the
contents of registers OCR1A and OCR1B. When a match is reached, the bit
OC1A or OC1B is set or cleared according to the setting of the TCCR1A
control register and this action can cause a port bit, e.g. PB.1 or PB.2
to be set or cleared. In turn, PB.1, PB.2 and PD.5, PD.6 set the state
of the LB1836M motor controller, according to the above table. To avoid
confusion, in the code I've followed
the LB1836M documentation with regard to the definition of "forward" and
"reverse", but simply reversing the motor leads reverses these. There is
actually a good reason to do so, given the design of the Orangutan.
This is because the motor off-state during the PWM cycle can be either
braking or coasting, depending on the controller configuration, and the
two states do behave differently.
8-bit Phase Correct Mode
This mode is easy to use and does not require interrupt programming.
According to the ATmega8 documentation, this mode is preferred for motor
control, but I didn't see a difference compared to fast PWM mode except
for cycle time. In my implementation (see code pwm_8PC_direct.c), for forward motion,
OC1A=PB.1 is set high as TCNT1 increments, until match is reached with
OCR1A and then it is set low (likewise for PB.2). After TCNT1 reaches 255
(0xFF), it reverses direction and counts down until a match is again
reached, and PB.1 (PB.2) is set high again. Thus, the right motor is ON
until TCNT1=OCR1A and then it is off until TCNT1 counts down again to
rematch, whereupon it is turned on again, ad infinitum. The direction of
travel (and the nature of the "off" state) depends on the setting of PORTD
bits 5 and 6. In my code, forward motion alternates with "coast"
and reverse motion alternates with "brake" but this could be changed by
swapping motor leads and the speed variables. Forward PWM does not have
the same relation between speed and PWM (OCR1A/B) setting or motor current
draw as does reverse PWM, see below.
8-bit fast PWM
In this mode, TCNT1 counts from 0 to 0xFF and then overflows to 0. If
desired, an interrupt is generated when this overflow occurs. As in other
modes, TNCT1 is compared to OCR1A and OCR1B, and the bits OC1A and OC1B
are set or cleared on match. This can be used to provide PWM without
interrupts as in the above case, that is, PORTB bits 1 and 2 can be made
to change accordingly by the hardware. However, as in the previous
example, forward and reverse "off" modes are different. In order to get
around this, the bits OC1A and OC1B must be disconnected from PORTB and
the
appropriate actions are then taken by interrupt routines. In my
implementation, when TCNT1 overflows, the motors are turned on in the
appropriate direction, as determined by the global variables r_speed and
l_speed. When TCNT1 matches OCR1A or OCR1B, the right or left motor is
turned off, either in brake mode or coast mode, depending on which code
example is loaded. A special case occurs when l_speed or r_speed=0, in
which case the motor is never turned on. This avoids glitches in the
output.
In my implementation, three interrupt service routines are required
(TCNT1 Overflow, Compare matches TCNT1=OC1A and TCNT1=OC1B). The basic
routines pwm_brake.c and pwm_coast.c were written to implement this approach
and to study current draw and wheel rotational period (converted into
robot forward speed) as a function of the PWM settings. Hopefully this
example will be useful to others. Please feel free to offer corrections
or suggestions. The example driver program pwm_modetest.c can be used to call one of the
two PWM routines and exercise the motors.
If the foregoing is not completely clear, well, there is always the
ATmega8 chip documentation...
PWM mode tests
Although 255 motor speed steps are
permitted,
the gears are stiff enough that even when held off the ground, the wheels
on my test rig don't rotate until the PWM setting is about 35, and little
difference is seen for increments of 1 step. I chose to monitor free
rotation of the robot wheel, that is, the robot did not need to drag
itself around. Needless to say the LCD display is hard to read when
moving! Besides, everyone's robot will behave differently. I measured
the overall current draw of the entire robot (Orangutan plus motor
controller plus WheelWatcher) by a multimeter in series with the battery
leads. With the motors off in "coast mode" about 60 mA was
consumed. With
motors off in "brake mode" about 120 mA was consumed, due to ~60 mA
base current for the output transistors in the motor driver chip. Maximum
current draw for "free air" rotation (right wheel only) was around 250 mA
in brake mode PWM. The current draw is of course higher if the robot is running
on the ground.
For brake mode, the wheel speed is very linear with the PWM
setting but the current consumption is generally high and very nonlinear
with the PWM setting. Graphs of the results are posted below. As you can
see, the current draw is highest when the motor is running at about half
speed. This makes perfect sense: for half of the PWM cycle, the rotational
energy is being dissipated by the braking action. However, the speed
setting is quite robust, that is, low speed performance is good, and the
robot maintains its speed rather well if a bit of resistance is applied to
the wheel. Why this should be so is less obvious, and it is not true
for coast mode.
 .
.
For coast mode, the wheel speed is a nonlinear function of the
PWM setting, and tops out at well below PWM setting=255. The current draw
at low to intermediate speeds is quite a bit lower than with brake mode,
but about the same when both are maxed. However, at intermediate
speeds, the wheel rotational rate is not
robust and slight resistance applied to the wheel causes it to slow down
rather quickly. In the graphs at right, wheel speed is in arbitrary units
(AU).
Note on CPU clock speeds
The Orangutan is shipped with the
default CPU clock speed of 1 MHz. At best this leads to a PWM cycle time
of 3.9 kHz for 8 bit resolution. Higher frequencies of 10-20 kHz are
said to be
advantageous. You can reprogram the ATmega8 fuses to use an 8
MHz internal clock, which I did using AVR Studio 3.56 (when selecting the
device
programmer, a window opens allowing you to change fuse settings). All
of the examples shown here work, given appropriate changes to the delay
loops. The power drain and speed tests described above are reported for 1
MHz cpu clock only.
Preliminary conclusions: brake versus coast mode
For simple PWM speed control, brake mode has better linearity of speed
versus PWM setting and speed is maintained reasonably well with changes in
wheel motion resistance. However, current draw is high. With coast mode,
current draw is much lower at intermediate speeds, but the speed is a
nonlinear function of the PWM setting. Also, the speed depends strongly on
resistance to wheel motion. However, if the speed is actively
controlled by a PID algorithm, "coast mode" should be
superior as the power draw is lower.
PID code
With the above code in place, it proved straightforward to implement a PD
(Proportional/Derivative) algorithm to control the wheel rotational speed
in the arbitrary range of [80,255]--at lower than 1/3 power, motor
operation was found to be unreliable. "Coast mode" PWM was used
to save power. Wheel rotation is monitored by the WheelWatcher modules,
although the only signal actually used is the segment tick. It would be
much
cheaper to use a phototransistor to peer through spokes or holes to get
that
signal. The basic program operation is as
follows:
- Main program posts speed request and sets an approximate PWM
setting via the function call set_speed(left, right)
- Ticks from WheelWatcher activate an interrupt that measures the
current period, converts to velocity and applies the PD algorithm.
- The PWM module is controlled by the PD algorithm, which modulates the
motor power.
- A Timer0 interrupt provides a basic clock tick that, among other
tasks, counts down a separate timer for each wheel to detect a stall. If
this happens, the PWM on time for that wheel is bumped up.
The algorithm is proportional/differential (PD) with an
additional low-pass filter. I found it was not necessary to include an
integral term.
- Wheel rotational period is determined from the WheelWatcher
ticks.
- Period is low-pass filtered via per = 0.25*per + 0.75*last_per
- speed = constant/per. Constant is chosen so that max speed=255
- error = (requested_speed - current_speed)
- delta PWM = Kp*error + Kd*(error - last_error).
The PD code
Works great! Take a look at the
all-in-one example pid_kd_all.c.
Tuning the code
Tuning means to determine the mysterious constants Kp and Kd, which in
turn will depend on the system: motor gear ratio, battery voltage, overall
weight, friction, phase of moon, etc. There are entire web sites (plus
thick, four-color, expensive, dense & excruciatingly boring undergraduate
engineering texts) devoted to the process. Sadly, no standard notation
seems to have arisen, not even the sign of the error term seems to be
standard! It is easiest to start with floating point calculations and
then convert to integer math for speed. You will probably need 8 MHz
CPU
clock or higher.
The basic operation of
tuning is fairly simple: you begin with small Kp and Kd=0, and increase
Kp until first the system response (e.g. motor speed) stabilizes, then
further increase Kp until the response starts to oscillate. Back off Kp
a bit, then, increase
Kd in order to damp down the oscillations. In theory, there should at most
one overshoot in response to a step change in speed.
For more detail, one place to start is the WikiPedia entry.
However, Parallax Inc. has a great example of PID process control using
the Basic Stamp.
Finally, there is always Jeff Bachiochi's lovely example of magnetic
levitation in Circuit Cellar
(Issue 18, Dec-Jan 90-91), in which only 15 lines of BASIC code were
required to levitate a steel sphere with an electromagnet. For another
amusing example, see the PID-Pong levitating ping-pong ball challenge by
Tom Cantrell in issue #50 of the same publication.
To facilitate tuning, you should have a means of studying the
operation of
the algorithm at fairly high speed. Following an example C program posted
by
Nubotics,
I used high speed RS232 output
(38400 baud) using the built-in UART to capture the action of the PD
algorithm at 0.1 second intervals on a PC. All that is needed is a time
stamp, the
current speed and PWM settings, which is all the main loop of the test
program does after posting a requested speed. The output was captured by
HyperTerm and loaded into a spreadsheet for plotting. I found that
the values for Kp and Kd were not critical, with Kp in the range of 0.1 to
0.2 while Kd needed to be about 0.4 to 0.6. After an evening of
experimentation, I settled on Kp=0.15 and Kd=0.40. See the plots below for
some examples, with comments.
The graphs below show the speed and
PWM setting for about 30
seconds. The horizontal axis is clock ticks.
Note:I
physically grabbed
the wheel at two points during each test (for a few seconds) to slow it
down or stop it, so that I could observe the response.
Kp=0.1, Kd=0.0, note drift of speed about
setpoint--too little feedback
Kp=0.20, Kd=0.0, note violent oscillation of speed about
setpoint,
too much feedback
Kp=0.20, Kd=0.80. The violent oscillations are mostly damped
by
the error term, but the response is still jerky with large overshoots
Kp=0.15, Kd=0.40. Good enough--one overshoot is fine! (The regular
oscillations in speed
are due to slightly sticky gears)
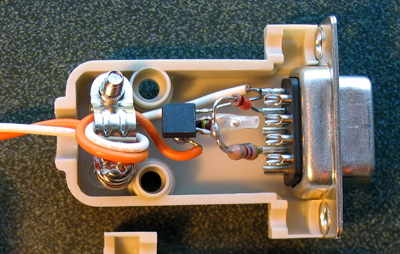
RS232 interface
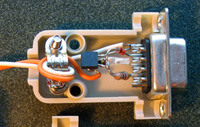
The RS232 AVR to PC transmit-only interface is port-powered from the PC
DTR, pin 4 (or RTS, pin 7) and it worked well at 38400 baud using a USB
to serial adapter.
Similar designs can be found in many places on the web, see for example
the
PICList
site. A schematic diagram is available here.
The diode is probably necessary as on my adapter, the RTS and DTR pins
swing from about +8V when
the port
is open to -8V when the port is closed, which could damage the transistor.
I built the circuitry into a D9 subminiature shell as shown above.
Baby O coding examples
Recently, I've gained some experience programing the Baby O, and it has
its charms. I decided to use this tiny board (with the mega168 option) as
a low-level controller for an
autonomous vehicle based on the Tamiya TXT-1 Monster Truck. The TXT-1 has
4-wheel drive and optional 4-wheel steering using two servos. It is not
convenient to use one channel to control two steering servos as this
limits the range of steering options. So, the choice
was to have a single
serial line control up to four servos. The Baby O will eventually handle
odometry and external sensors as well.
I based the controller on some very nice example
code which included a command interpreter monitoring the serial
port, distributed with WinAVR (stdiodemo.c, uart.c, etc.). This code
included an elegant input line
editor that accepts the delete character and word keys (^W), retype line
(^R), etc., so
it is
very convenient when using a terminal program to test servos!
The current implementation accepts, via the serial port, servo control and
other commands of the
form "C nnn" where C is a one-character command and nnn is an integer
argument. Check out this screenshot.
Currently, I have the Baby O controlling two steering servos,
either independently or synchronously, using commands such a "F 150" to
set the forward steering to neutral. The motor driver is an electronic
speed controller that accepts standard servo input pulses (Tekin Rebel).
I use Timer1 to control the steering servos with 0.01 ms resolution
(better
than one degree resolution in the steering angle) and Timer2 to control
the motor
with 0.05
ms resolution steps. This leads to 10 forward and 10 reverse speeds, which
may not be adequate. Timer interrupt routines control the servo output
pulses
on PORTC. This approach consumes a miniscule amount of CPU time and at
present, only about 7.8 KB of the 16 KB flash memory.
Three problems were encountered - two concerned the resolution of the
timers and the
high
clock speed of the Baby O. Surprisingly, 20 MHz is a disadvantage, because
an 8 bit timer overflows at 76 Hz, even when using the divide-by 1024
prescaler. To get a 1.5 ms servo neutral pulse requires just 29 increments
of the 8-bit timer, limiting the resolution to 0.05 ms (20 settings,
19-39, to
cover full scale travel). For a 16 bit timer this is not a problem as 468
increments of CPU clock/64 = 1.5 ms pulse, but there
is only one 16 bit counter on the Baby O. For this reason, Timer1 was used
to control the two steering servos while Timer2 controls the motor (which
leaves
one more low-resolution servo control line free). If anyone knows how to
obtain higher resolution from an 8
bit timer clocked at 20/1024 MHz, please let me know.
I used the Pololu USB to RS232 adapter to talk to the controller, and here
is where I encountered the third problem: if the Baby O is not powered up
when the USB adapter is plugged into an active port, the Baby O will be
weakly powered up from TX, through the input protection diodes on port pin
PD0. This caused it to respond unpredictably to the AVRISP programmer, in
some cases not at all. The problem was
solved by connecting a 10K ohm resistor between TX on the USB adapter and
RX (PD0) on the O.
A photo of the completed project (off truck) is shown at right.
Code
for the project follows:
servo_control.c
uart.c
uart.h
In the near future, I'll compile a table of annotated coded examples. At
the moment, this section is just a place to put random bits of potentially
useful code.
i2c.zip
I2C routines to read/write 24LC256 EEPROM and Devantech CMPS01
module. These run on the Baby O at 20 MHz but are easily changed to run on
the Orangutan at 8 MHz (just redefine the clock speed).
pwm_direct_t0.c
PWM motor control for the Orangutan (mega168 versions) using TIMER0.
These versions do not use interrupts but suffer from asymmetry in
power consumption as described above. Here "forward" is the most
power hungry, but also most linear mode.
atmega168_uart.zip
RS232 routine for the ATmega168 Orangutan, 8 MHz. These routines will
not compile for the ATmega8
due to changes in register and bit names -- see the data sheets. These
basic examples include both direct character I/O and two different
ways to define the uart as stdio. For a more serious example, see the
servo controller code above.
buzzer_tunes.c
Play music with your robot! This self-contained program allows you
to code and play a tune on the Orangutan, clock speed 8 MHz assumed.
See comments in code for theory of operation.
buzzer_tunes2.c
This is an entirely interrupt-driven version of buzzer_tunes, so that
a robot can do other things while playing music. Sadly, two timers seem to
be required to implement this.
button.c
Play the buzzer and read the buttons. No interrupts or timers are
used, however the wait loops tie up the CPU. This includes a main program
which plays three tones depending on which button is pressed.
Feel free to email
me with comments, questions or suggestions.
Copyright
(C) 2006 by S. James
Remington. All rights reserved.
{kind=link}
{kind=link}