 Molecular Dynamics -
Integration Algorithms
Molecular Dynamics -
Integration Algorithms
Contents
At its simplest, molecular dynamics solves Newton's familiar equation
of motion:
- Eq. 5-1:
-
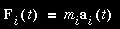
where Fi is the force,
mi is the mass, and
ai is the acceleration of atom i.
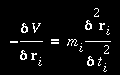
The force on atom i can be computed directly from the
derivative of the potential energy V with respect to the
coordinates ri:
- Eq. 5-2:
-
Notice that classical equations of motion are deterministic. That is,
once the initial coordinates and velocities are known, the coordinates
and velocities at a later time can be determined. The coordinates and
velocities for a complete dynamics run are called the
trajectory.
A standard method of solving ordinary differential equation such as Eq. 5-2 numerically is the finite difference
method. The general idea is as follows. Given the initial coordinates
and velocities and other dynamic information at time t, the
positions and velocities at time t +  t are calculated. The timestep t depends on the integration method as
well as the system itself. All the solution methods offered by the
Discover program belong to this category.
t are calculated. The timestep t depends on the integration method as
well as the system itself. All the solution methods offered by the
Discover program belong to this category.
Although the initial coordinates are determined in the input file or
from a previous operation such as minimization, the initial velocities
are randomly generated at the beginning of a dynamics run, according
to the temperature and a random number seed. To repeat the exact same
dynamics run, it is important to specify the random number seed used
in the previous run, as found in the output file. This guarantees
generating the same set of initial velocities in the current run. More
details on the initial velocities are provided in the temperature section.
Molecular dynamics is usually applied to a large system. Energy
evaluation is time consuming and the memory requirement is large. To
generate the correct statistical ensembles, energy conservation is
also important. Thus, the basic criteria for a good integrator for
molecular simulations are as follows:
- It should be fast, ideally requiring only one energy evaluation per
timestep.
- It should require little computer memory.
- It should permit the use of a relatively long timestep.
- It must show good conservation of energy.
Integrators in the Discover 2.9.5 and
95.0 Programs
Integrators provided in the Discover program are chosen
according to those criteria. The Discover 2.9.5 program uses
the Verlet leapfrog algorithm. In the Discover
95.0 program, you can choose one of several integrators: Verlet velocity, ABM4, and Runge-Kutta-4. The Verlet velocity method is the
default, since it satisfies the above criteria best.
Variants of the Verlet (1967)
algorithm of integrating the equations of motion (Eq. 5-2) are perhaps the most widely used method in
molecular dynamics. The Discover program uses the leapfrog
version in release 2.9.5 and the velocity
version for release 95.0. The advantages of Verlet algorithms is
that it requires only one energy evaluation per step, requires only
modest memory, and also allows a relatively large timestep to be
used.
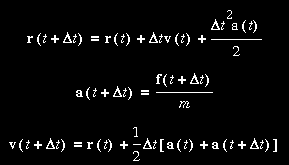
The Verlet leapfrog algorithm is as follows:
Given r(t), v(t -t/2), and a(t), which are
(respectively) the position, velocity, and acceleration at times
t, t -t/2, and
t, compute:
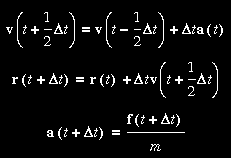
where f(t + t) is
evaluated from -dV/dr at r(t + t).
The Verlet leapfrog method has one major disadvantage: the positions
and velocities calculated are half a timestep out of synchrony.
To overcome the shortcoming of the Verlet leapfrog method, the Verlet
velocity algorithm is implemented in release 95.0 of the
Discover program.
The algorithm is as follows:
Given r(t), v(t), and a(t),
which are (respectively) the position, velocity, and acceleration at
time t, compute:
ABM4, which stands for Adams-Bashforth-Moulton fourth order, is a
predictor and corrector method. It is a fourth-order method, meaning
that the truncation error is to the fifth order of the timestep
used. This method requires two energy evaluations per step and has to
make use of the results of the previous three steps. It is thus not
self starting--the first three steps are generated by the Runge-Kutta
method. More memory has to be used, because previous information has
to be stored.
The algorithm is as follows:
Let:

where subscripts (not shown above) 0, 1, -1, -2, and -3 indicate
y at times t, t + t, t - t, t - 2t, and t - 3t.
The predictor is:

Now evaluate y'1, using the predicted
y1, which involves one energy evaluation.
The corrector is:

Now evaluate y'1, using the corrected
y1, which involves another energy evaluation.
Runge-Kutta-4 stands for the fourth-order Runge-Kutta method, which is
one of the oldest numerical methods for solving ordinary differential
equations. The method is self starting but requires four energy
evaluations per step. From testing done at Biosym/MSI, the timestep has to
be very small. This is thus not a very suitable integrator for
molecular simulation. However, the method is very robust, meaning that
it can deal with almost all kinds of equations, including stiff
ones. This integrator is used to generate the trajectory for the first
three steps for ABM4. Since this integrator should
not be frequently used, the algorithm is not presented here. Details
can be found in Press et
al. 1986.
 Main
access page
Main
access page  Theory/Methodology access.
Theory/Methodology access.
 Dynamics access
Dynamics access
 Dynamics - Background
Dynamics - Background
 Dynamics - Choice of Timestep
Dynamics - Choice of Timestep
Copyright Biosym/MSI